Parking Space Detection was a project I took along with a group member in the Autonomous Intelligent Systems lab organized by University of Freiburg. The goal of this lab course was to detect parking spots inside images first using 2D images and than later combining the results with 3D point cloud data collected from laser scanners.
Approach
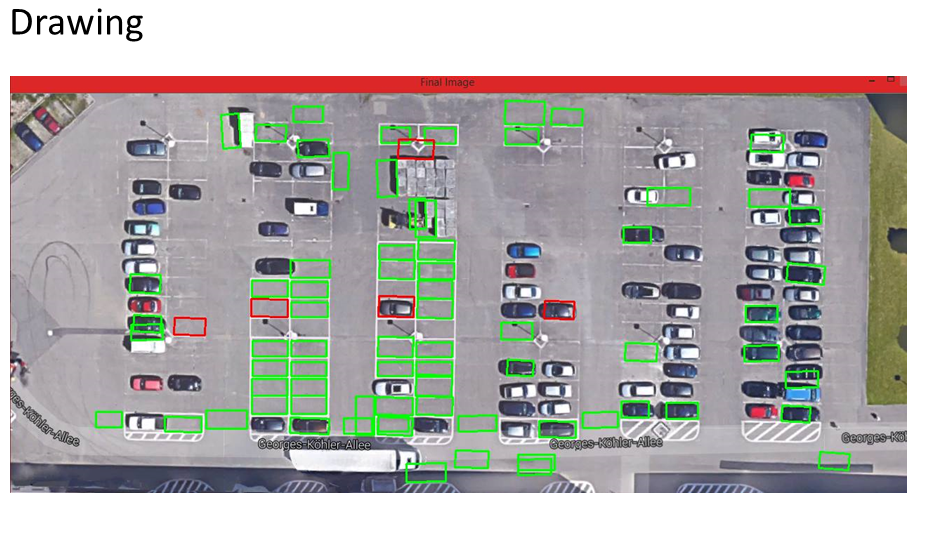
Initially to detect the parking spots from a more visible image, we used OpenCV to detect the parking spaces in the image. This gave us the results as follow.
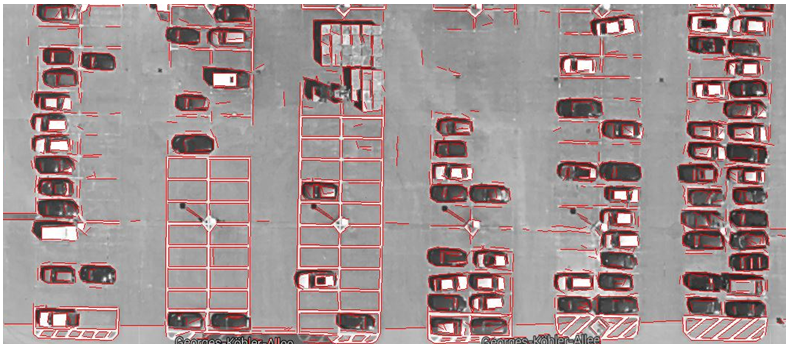
Our next goal was to detect the parking spaces from a 3D image in real time. To achieve this, we dug down into the Point Cloud library used for converting images into cluster of useful points. The algorithms used in the technology make sure to first convert the images into 2D point clouds which are further considering the range distances and patterns behind the images. This helped us to identify patterns in the image.
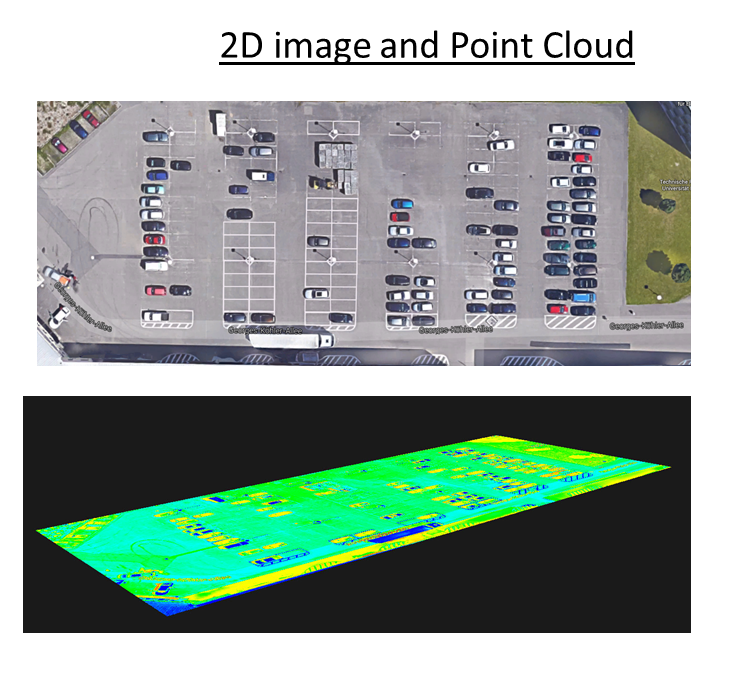
We than moved onto secure 3D point cloud data of the same parking spaces using a robot. Which gave us the following results.
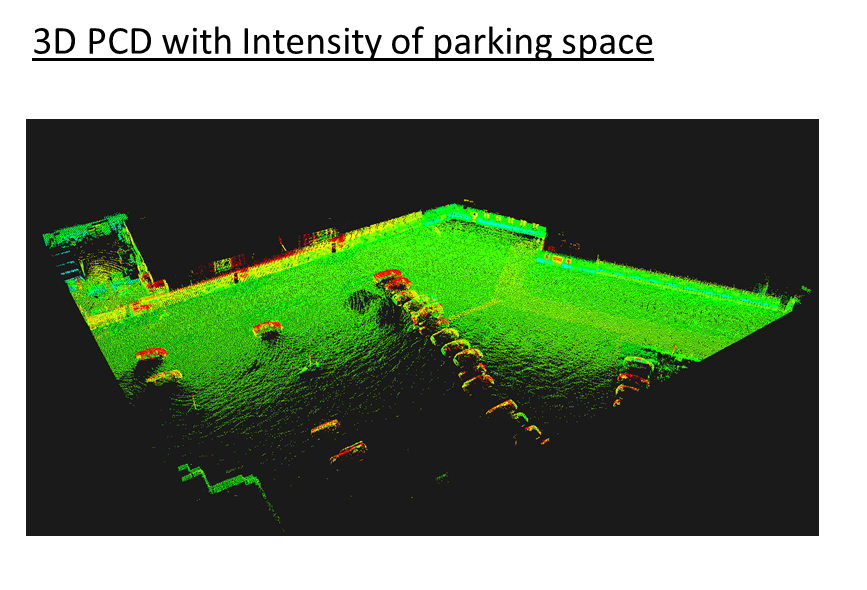
Than we used 3D point cloud data mapped onto 2D point cloud data to find the parking spots. On top of that we had to use logistic regression as our Machine learning algorithm to classify parking spaces on the images. Which gave us the following results.